����P�C�Q���̑g�ݗ��� �O�R�^�R�^�Q�U�@  �@�@�@ �@�@�@ �@�@�@�@�@��P���̓��e���B�V���[�V�[�A�M���{�b�N�X�@�@�@��Q���̓��e���B���[�^�[�A�d�r�P�[�X�A�O���[�X  �@�@�@ �@�@�@ �@�P�C�Q�����ɑg�ݗ��Ă��B�v�����f����g�ݗ��Ă�v�̂ŊȒP�ɑg�ݏオ�����B���̓M�A�{�b�N�X�̊��ݍ��� ���ł���B�A�^�����������`�[�Ƃ����������邪�A�ق��̈ى�������ƃA�^�����������Ƃ��킩��B��������ʐ^�̃M�A �{�b�N�X�̃A�^�������܂��Ȃ������̂Œ��������B�M�A���{�b�N�X�ɓ������Ĉى����o���Ă����B�܂����[�^�[���̃M�A�� �����M�A�̃A�^���������悤�������B �@���E�̃A�^���������ƌ�X���e����^�����i���i�s�\�j�����m��Ȃ��̂ŁA���̒�������ԏd�v�ł��낤�B�o���オ �����V���[�V�[���ォ��͂��������ɁA�V���[�V�[�̒[�������āA�O��ɉ����Ă݂�B���ւ����ΐ����ł���B������ �ւ���]���Ȃ��悤�ł���A�^���������̂Œ����̕K�v������B�Ƃ��ɉ����Ĉ����Ƃ��A�ǂ��炩����]���Ȃ��Ƃ��̓M �A�̃N���A�����X���������Ƃ��킩��܂��B �@�Ō�ɓd���͍��������m��Ȃ����A�Б������[�^�[�̃R�l�N�^��d�r�̃R�l�N�^�ɍ�������Ŏԗւ���]�����ă` �F�b�N���Ă݂�B���̏�ŃN���N�����ΐ����ł���B���̂Ƃ��M�A�̉������E�����ł���Ό������ƂȂ��ł��傤�B ����R���̑g�ݗ��� �O�R�^�S�^�P�@  �@�@ �@�@ �@����̃p�[�c�̓o���p�[�A�r�v�A�O�ւ݂̂ŁA�͂���P��ڂ̃p�[�c���猩��ƕ��i���̓O�b�Ə��Ȃ��Ȃ����悤 ���B�P�O�����܂�ō���̑g�ݗ��Ă͏I�������B���ӓ_�Ƃ��ăo���p�[�̃^�b�v�t���̃l�W���߂͏��߂��炫���̂� ���߂������l�W�R���Ԃ��Ȃ����Ƃ��̐S�ł���B �@���ɓd���̃R�l�N�^�[�̃Z�b�g���`���b�Ɩʓ|�ł���B���W�I�y���`���s���Z�b�g�ł܂�Őڑ�����ΊȒP�Ȃ悤���B �����r�v�̌������C��t���Ȃ��Ƃn�m�A�n�e�e�����ɂȂ�B�O�ւ�t���ĉ����猩��Ə����O�̕����オ���Ă��銴�� �ł���B ����S���̑g�ݗ��ā@�T�C�{�b�g�������o���B�i����͂��߂�j �O�R�^�S�^�P�U�@ �@ �@���炭���s�ɍs���Ă����ׁA�Q�T�ԕ����܂��Ă��܂������A���i�������Ȃ��̂ł����Ƃ����Ԃɑg�ݗ��Ă��I��� ���B  �@�@�@�@�@�@�@�@�@�@���s�p�p���[�h���C�u���i�����t�����B�@�@Windows Media Player�ő��s��ʂ������܂��B �@���炵�Ă݂�ƌ��\�ȃX�s�[�h���o��B���q�悭���s����̂ŁA�� �����䂵�Ă݂������A�܂��܂���ɂȂ�悤���B
����T���̑g�ݗ��� �O�R�^�S�^�P�U�@  �@�t�����g�V�[���h�����t����Ə����T�C�{�b�g�̎p�ɂȂ��Ă����� �@�t�����g�V�[���h�����t����Ə����T�C�{�b�g�̎p�ɂȂ��Ă����������B���̃V�[���h�����t����Ƃ��A�O��̃o���p�[�����Ԃ��Ɏ� ��t�������ƂɋC�������B �@�낭�ɐ��������ǂ܂��ɂ����g�ݗ��Ă�Ƃ������������Ȑ��i���� �悭���̂悤�Ȏ��s�����ł����B �@�g��ł���Ƃ��A�Ȃ��l�W������ɂ���̂��ȂƋ^��Ɏv�������� �̂܂܂҂�����Ǝ��܂����̂ł���Ń��V�Ǝv�����̂��ԈႢ�̌��� �������B �@���ǁA���Ԃ��̂܂܂ł̓V�[���h���o���p�[�Ɉ����������Ď��t �����ł��Ȃ����Ƃ��獡��̎��s���킩�����B �@�@��������ƃe���g�E���V��������ɂȂ�H ����U���E��V���̑g�ݗ��� �O�R�^�S�^�Q�V�@ �@�U���͂X�u�p�d�r�P�[�X�̎��t���ƃg�b�v�p�l���A�����p�l���̎��t���ŏI���B���̃l�W���^�b�v�l�W�Ȃ̂Ŏv���� ��˂����ނƃl�W�R���i���b�Ă��܂����ꂪ����B �@�V���̓Z���T�[�̎��t���ŏI���B���ӓ_�Ƃ��Ă̓Z���T�[�̃L���b�v��}������ہA������������ނƑ���܂� �\��������B���܂��Z�b�g����ƃp�`���Ƃ����������Ď��܂�B   �@�����Ƃ����ԂɎ��t�������B ���T�͍��ʐ^�̌��Z���^�[���i�̂݁B����łP�Q�O�O�~�Ƃ́E�E�E�E�E�B ���߂ė��T�̊�Ոʕt���ė~���������B ����W���E��X���̑g�ݗ��� �O�R�^�T�^�P�O�@  (C)DeAGOSTINI (C)DeAGOSTINI  �@�@�@�@�@�����悤�ȕ��i���Q�T�ɓn���Ĕz�z�@�@�@�@�@�@�@�@�@�@�@ ���X�ƕ��i���R�l�N�^�ɍ�������ŏI�� �@��W���̌��h�^�n�{�[�h�A��X���̌��v���Z�b�T�[�{�[�h�̐ڑ����I��������A���悢���p�X�u�̊��d�r���Z�b�g �����e�X�g���s�B�ʔ����悤�Ɍ��ɔ�������B���R�̖��邳�ł����Â������ăN�����ƕ�����ς���̂ɂ͋������B���s �O�̃e�X�g�͖��邢�Ƃ���ŃT�C�{�b�g����Ɏ����r�v���n�m�ɂ���Ɨ��ւ���邱�Ƃ��m�F���ĕЕ������Z���T�[�� �w�ŕ����Ǝԗւ̉�]����~����ΐ����ł���B�Z���T�[�����݂ɖ��邢���Ɍ����Ă������e�X�g���ł���B�Z���T�[ �̊��x�������悤�Ȃ̂łǂ��炩�Ƃ����Ɨ��ւ��̂�����B�Ɠx�����E�����łȂ��Ɨ��ւ����Ȃ��悤���B
�O�R�^�O�U�^�O�U�@ ����P�O���X�s�[�J�[�T�C�h�p�l���A�h�[�������t����  �@�@ �@�@ �@�T�C�h�p�l����t�����Ƃ���A�ǂ������ʂ��s�b�^���ƍ���Ȃ��悤���B�悭����ƕБ��̐ڒ��ʂ��꒼���łȂ������� ��ł���悤���B�{���ɘA�����ĐV�������̂ƌ��������炤�܂��Ƃ�悤�ɂȂ����B�������A�������Ă��炤���ߕs�Ǖi�� ���ہA�܂�܂��Ă��܂����B����ł͌����͖����ƂȂ�A���ǂP�O���������P�������H�ڂɂȂ��Ă��܂����B �@�T�C�h�p�l���̃l�W�~�߂͂��܂肫���߂Ȃ����Ƃ��̗v�ł���B���ꂩ�����������O���͂��ł�B���̒i�K�� �͂܂��u�U�[�͖�Ȃ��悤���B ����P�P���E��P�Q���A���e�i�ƃ��C���ǐՃP�[�X�A���C���ǐՃZ���T�[�����t���� �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@  �@�P�P���ɂ͏ۂ̕@�̂悤�ȃ��C���ǐՃP�[�X�ƍ����̐G�p�̂悤�Ȃk �d�c�̃A���e�i���t���Ă����B�P�Q���̓��C���ǐp�̃Z���T�[�̂� �̔z�z�B �@�Q�T�ԕ����܂Ƃ߂đg�ݗ��Ă�B�Ƃ��ɗ��ӓ_�͂Ȃ����A�g�ݗ��� ����A�d���r�v����ꂽ���A�A���e�i�̂k�d�c����u����ΐ���ł� �낤�B����قǖ��邭�Ȃ��̂Ń`�F�b�N�͈Â���Ńe�X�g����Ηǂ��� �v����B  �@�@�@�@ �@�@�@�@ �@�@�@�@�@�@�@�@�܂��܂������Ɏ��Ă��܂����@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���C���ǐp�Z���T�[�̊g�� �O�R�^�O�U�^�P�R�@ ����P�R���@�\�i�[�v���Z�b�T�[�{�[�h�����t����B �@�@��P�S���@�\�i�[�h�^�n�{�[�h�����t����B  �@����͂P�T�C�P�U���Ŏg�p����\�i�[�W�̃{�[�h�����t����B �@����͂P�T�C�P�U���Ŏg�p����\�i�[�W�̃{�[�h�����t����B�h���C�o�[�P�{�ł��ׂĎ��t���I���B �@���t����ۂ̓T�C�h�p�l�����O���Ď��t����Ƃ�����Ɗy�ł� ��B �@�{���ɂ���悤�ȑg�ݗ��ĕ��@�͑�ςł���B���肷��ƕ��i�� �Ă��܂�����A�R�l�N�^�[�̐ڐG�s�ǂ��N���������ɂȂ�Ǝv�� ���B �@����悭����Ǝ��ƂŔ��c�t�����Ă���悤���B�����̍��ō� �����Ă���̂��͕s�������A���c�����g�p���Ă��Ȃ��ƌ��\�e���v�� ������̂łȂ����ƐS�z�ł���B (C)DeAGOSTINI 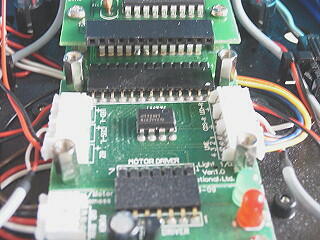 �@�@�@�@�@ �@�@�@�@�@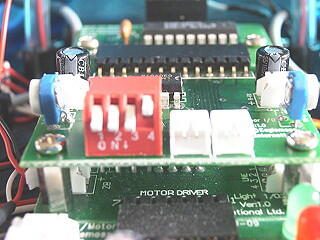 �@�@�Q�K�����Ƀ\�i�[�v���Z�b�T�[�{�[�h�����t����B�@�@�@�@�������Q�K��O�ɂh�^�n�{�[�h�����t����B �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�c�h�o�r�v�͂P�U�i�Łh�d�h���Z�b�g���ă��C���ǐ� �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���[�h�ɂȂ�B �@��t���킩�������R�l�N�^�[�̍������݂������ɂ�����������B�a�a�r�ł悭���삵�Ȃ��Ƃ��������邪�A��x�R �l�N�^�[�����_�����Ă݂�Ηǂ����낤�B �@�r�v������ƂS��قǃu�U�[����A�k�d�c����u����܂��B���̌�A���C�����Ȃ����đ���n�߂܂��B�����̖��Â� �s���̎��̓o�b�N������A���邭����܂��B
�O�R�^�O�U�^�Q�V�@ ����P�T���A��P�U���@���E�̃\�i�[����M�Z���T�[�����t����B  �@ �@ �@ �@ (C)DeAGOSTINI �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�t�^�̃T�C�{�b�g���H�@�@�@�@�@�@�@�@�@�@�@�@�@�@�P�[�X������ 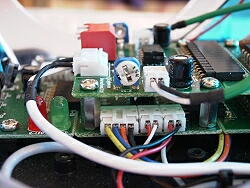 �@�@ �@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�|�e���V�������[�^�[�̈ʒu�@�@�@�@�@�@�@�\�i�[�Z���T�[�̎��t���@ �@�@�@�@�@�@�@�@�@�@�@�@�@�͂��ꂭ�炢���ȁ@�@�@�@�@�@�@�@�@�@�@�@�@�㑤����M�A���������M �@���E���\�i�[�E�Z���T�[���������̂Ŏ��t�����J�n�B�P�O���ʂŎ��t�������B���Ƃ̓|�e���V�������[�^�[�̒��� �ɏ������Ԃ����������B���̑O�ɂ��������V�������H���t�^�ɓ����Ă����̂ŁA���\�̃p�^�[���ŏ����V�ԁB�}�J�[�u �ł��قƂ�ǃR�[�X���O�����Ƃ͂Ȃ������B�����Ƒ�����ԂɈႢ�Ȃ��B�����_�͎�̐U����łǂ��炩�ɍs���悤���B �@�|�e���V�������[�^�[�̒����͎��̂悤�ɍs�����B �@�@�@�@�@�@�@�܂��͂c�h�o�D�r�v�̐ݒ�B�O�P�O�O�ɃZ�b�g���āA�r�v������Ɩ{���ʂ�̃u�U�[����܂��B �@�@�@�@�@�A�@���E�̃|�e���V�������[�^�[���E���ɉ����Œኴ�x�ɂ���B���̏�Ԃ����i����n�j�B �@�@�@�@�@�@�@ �ǂ��炩�Ɋ��ꍇ�̓M�A�{�b�N�X�����Ē��i�ł���悤�ɂ���B �@�@�@�@�@�B�@���̒������I���Ζ{���̒������@�ŃX���b�V�����h�ʒu��T���o���B �@�@�@�@�@�C�@����Ŏ��������Ă݂�B�������x���������悤�łV�O�Z���`�ʂʼn������̂ŁA���������x������ �@�@�@�@�@�@�@ �Q�O�Z���`���炢�ʼn������悤�ɃJ�b�g�E�A���h�E�g���C�Ŕ���������Ί����ł���B �@�@�@�@�@�@�@�i�@��ˑ������g�p�A���݂܂���j �@���点�Ă݂�ƂȂ��Ȃ����������������B���E�ƑO�ʂ��ǂ̎��͂��Ƃ����肵�ĕ�����ς���B�܂�ŔL�̓����� ������ł���B���ꂩ��̐������y���݂ł���B
�O�R�^�O�V�^�O�U�@ ����P�V���@��{�@�\�������T�C�{�b�g�̃{�f�B�������I �@����̂P�V���ŃT�C�{�b�g�̃{�f�B�Ɗ�{�I�ȑ��肪���������B�����܂ł̔�p�͖�Q���~�B���ꂩ������\������ɂ� �肻���ł���B  �@�@�@ �@�@�@ �@�@�@�@�@�@�@���T���̓{�f�B�̃p�l���ƃr�f�I���t���@�@�@�@�@�T�C�{�b�g�̑S�̎ʐ^�Ȃ��Ȃ��i�D���悢 �@�@�@�@�@�@�p�l����ڂɓ��Ă�Ƃ܂�ŃE���g���}�� �@�@�@�@�@�@�ł���B�u�V�����b�c�v�ň�C�Ɋ��� �@����̖ڋʂ����̒ǐՃ��[�h�ł���B�P�U���ł��łɂ��̃��[�h�ő��s�\�ł��������A���̃T�C�g�ł͂����܂ł��{ ���̗���ɉ����Đ��삷��\��ł���B �@�ǐՃ��[�h�ő��s������ׂ��c�h�o�A�r�v���h�O�P�P�O�h�ɃZ�b�g����B�r�v������Ƃ����̒ʂ�u�U�[����A�������̂� �ǐՂ��n�߂�B�������ꂸ�Ƃ����������ŁA�Ȃ��Ȃ������ǂ������ł���B�����̂���߂�ƈ��̋�����u���ăT�C �{�b�g����~���A�܂������ƒǐՂ���Ƃ�������ł���B �@���̃��[�h�ő��s�����邽�߂ɂ����E�̃|�e���V�������[�^�[���ׂ�����������K�v������B���̃��[�h�삳�� ��Ƃ���������[�h�������ɓ��삵�Ă���A���̂܂܂̊��x�ŒǐՃ��[�h�����v�Ǝv����B���܂������Ȃ��Ƃ� �͂ق�̏��������Ƃ��R�c�ł���B�|�e���V�������[�^�[���ő労�x����Œኴ�x�ɃZ�b�g���Ď�������Ǝ��̂� ���ȓ���������B �@�@�@�@�@�@���x�̒Ⴗ���i���v����t�j�̏ꍇ�͏�Q���ɂԂ�������A��~�����܂܂ɂȂ�B �@�@�@�@�@�A���x�̍������i�t���v����t�j�̏ꍇ�͂��̏�ł��邮��������A�o�b�N�����肷��B �@�@�@�@�@�@�Ƃɂ�����Q�����Ȃ��̂ɓ������B �@�ȏ�̓��삪�o���班�����|�e���V�������[�^�[���Ē������Ă݂�Ƃ悢���낤�B�Ƃɂ����{���̒������@���s ���Ίm���ɓ��삷��͂��ł���B
|